Formation Control with Orientation Alignment and Constrained Input
Abstract
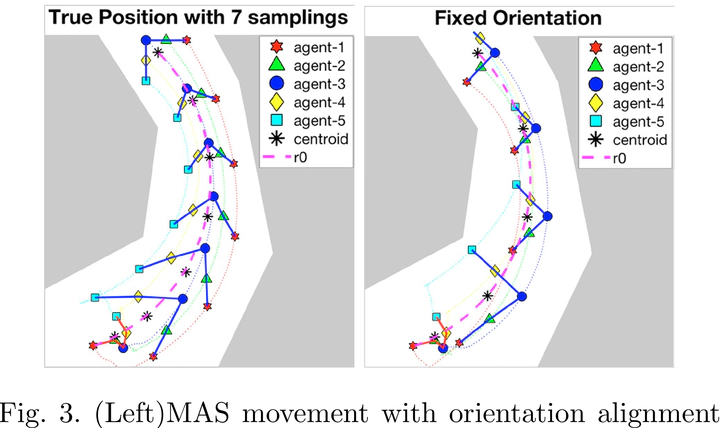
We design a formation controller for Multi Agent Systems such that the agents can form into the desired shape and track a given reference trajectory. The main feature of the proposed design is that not only the orientation of individual agents, but also the orientation of the whole formation is considered and is designed to be aligned with the moving direction of the reference trajectory, which helps the tracking movement to be smoother compared with the common tracking results. Moreover, the control inputs are designed in predefined input ranges to reflect the practical system. System stability is proved based on nonlinear system theory and some simulations are given to validate the proposed results.
Type
Publication
IFAC-PapersOnLine