Ordered formation control and affine transformation of Multi-Agent Systems without global reference frame
Abstract
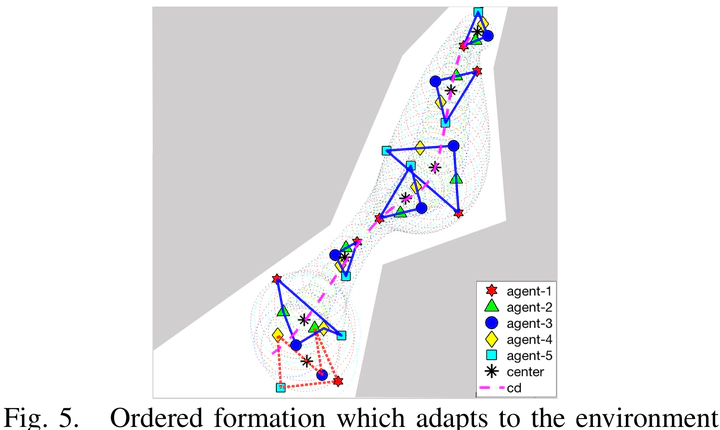
The purpose of this paper is to design a control law such that the multi-agent system can form into arbitrary shape, rotate around the centroid which tracks a given trajectory, and further adjust the formation into various shapes based on the affine transformation command. Moreover, the specified order between agents is crucial in some tasks, and hence ordered formation is addressed in our approach. The information for controller is measured locally from the neighbors and is in the local reference frames. To facilitate the goals, we propose an extended model and introduce the penalty flow exchanging mechanism which deals with the ordered formation. The control law is derived based on stability analysis, and a simulation example is provided to validate our results.
Type
Publication
2019 American Control Conference (ACC)